Thiết bị này hiện đang được phát triển bởi các nhà khoa học tại Đại học Carnegie Mellon,áttriểnrobotbọcnhựacóthểsửachữađườngốngdẫnkhítừbêkq cup c1 chau a đứng đầu là Giáo sư Howie Choset và nhà khoa học nghiên cứu Lu Li. Nó được thiết kế để đi qua các đường ống, sử dụng cáp rốn để chuyển tiếp video thời gian thực tới và nhận lệnh từ người điều khiển ở trên mặt.
Trọng tâm của robot là mô-đun di chuyển được trang bị một cặp bánh xe 2 inch ở phía dưới và một bánh ở trên. Ba bánh xe có động cơ này ép vào thành trong của đường ống, tạo ra lực kéo cần thiết để kéo mọi thứ khác đi theo. Có khả năng nặng tới 27 kg, "mọi thứ khác" bao gồm mô-đun pin; mô-đun lập bản đồ sử dụng cảm biến quang học HD; tia laser để đo và tạo hình ảnh 3D bề mặt bên trong đường ống; mô-đun sửa chữa.
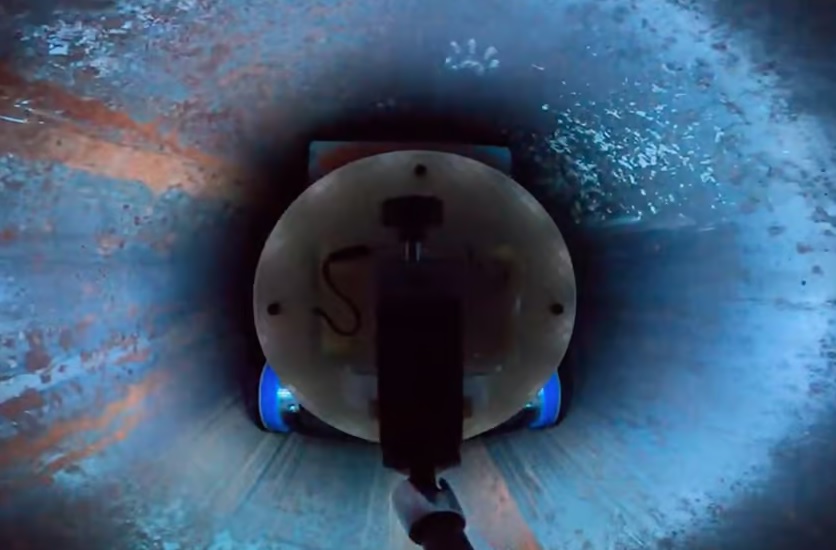 Mặt sau của robot, khi nó bôi thạch dầu mỏ màu xanh lam (một chất thay thế cho nhựa cứng nhanh) vào bên trong một đoạn ống.
Mặt sau của robot, khi nó bôi thạch dầu mỏ màu xanh lam (một chất thay thế cho nhựa cứng nhanh) vào bên trong một đoạn ống. 







